
Mr.Mass
КористувачіПовідомлення, опубліковані користувачем Mr.Mass
-
-
10 часов назад, Y.fowler. сказал:стоит ли заморочиться успокоительными роликами или пока забить?
У дельты есть фильтры для настройки подавления вибраций, если ремень будет резонировать, то можно попробывать сначала ими поиграться, если не будет получаться - тогда уже думать про ролики.
10 часов назад, Y.fowler. сказал:других в наш магазин не завозили
Скоро завезут
") 0
0 -
1 час назад, andrey.drabchuck сказал:наверное прийдётся тоже купить.
На олх видел много продают ЕМ141. НО инфы на них не смог найти. По виду вроде как вообще слабые. Это так?
Да, эти совсем мелкие, еще какие-то из имеют имеют шаг 7 или 8 градусов, вообщем совсем неподходящий вариант. Оставались после всех опытов 3 или даже 4 шт. таких, которые использовал на станке, если ничего не найдется - могу задарить для опытов.
0 -
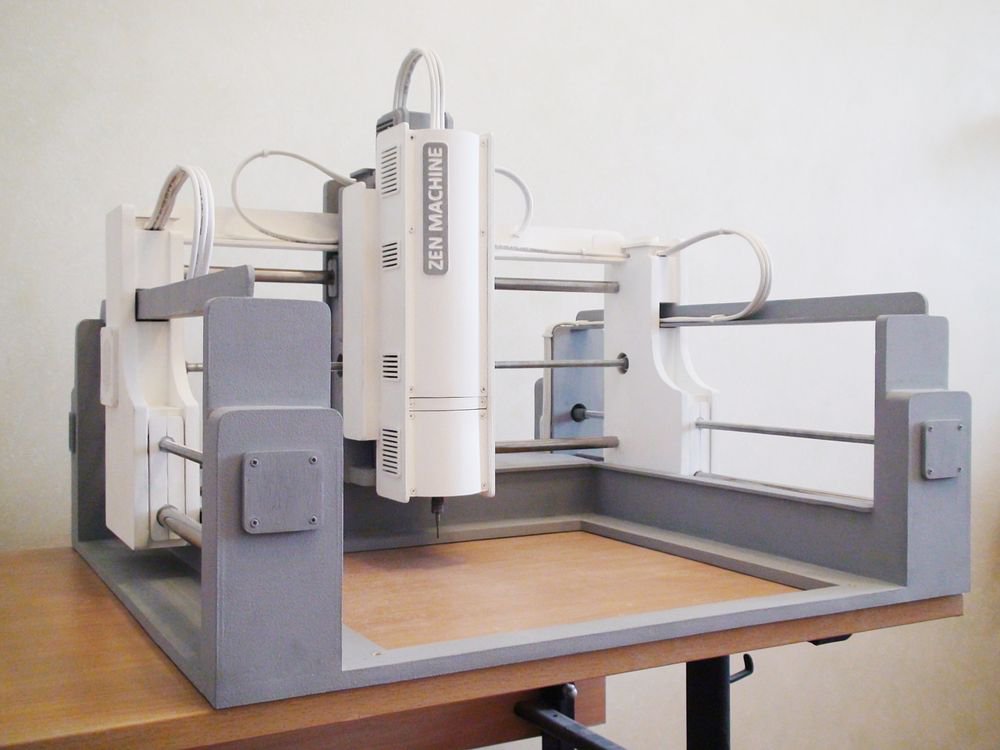
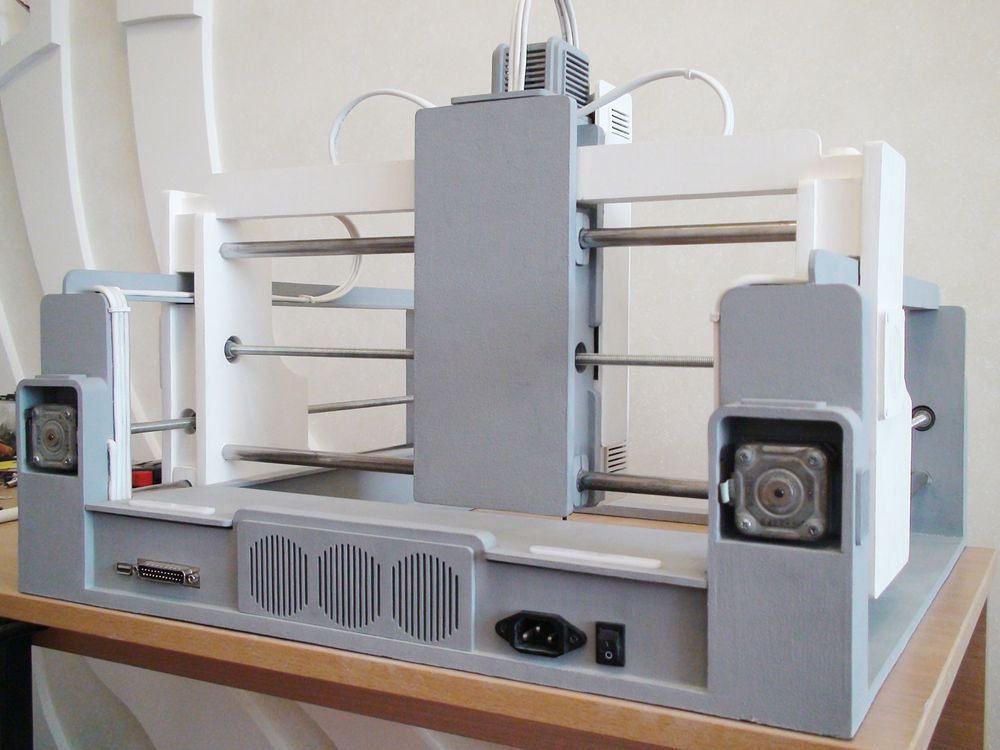
Вот нашел свою фанерку, валы со втулками от принтеров, движки оттуда же, драйвера DRV8825, БП на 30В, управляется мачем, шпиндель - китайский дремель на, кажись, 125Ватт и 30к оборотов.
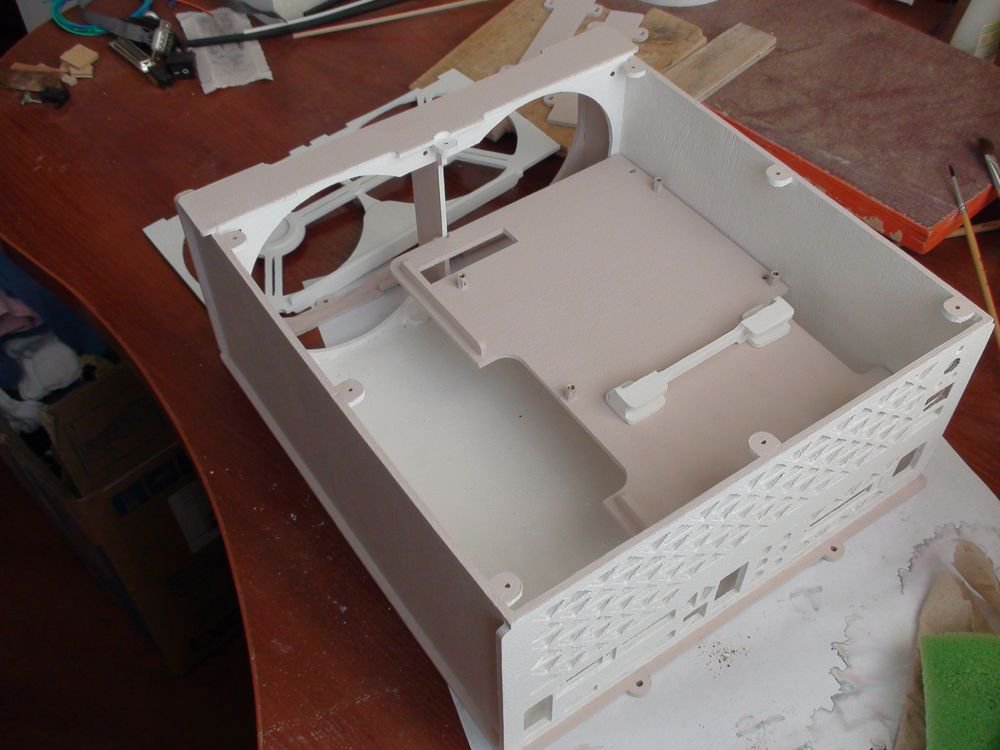
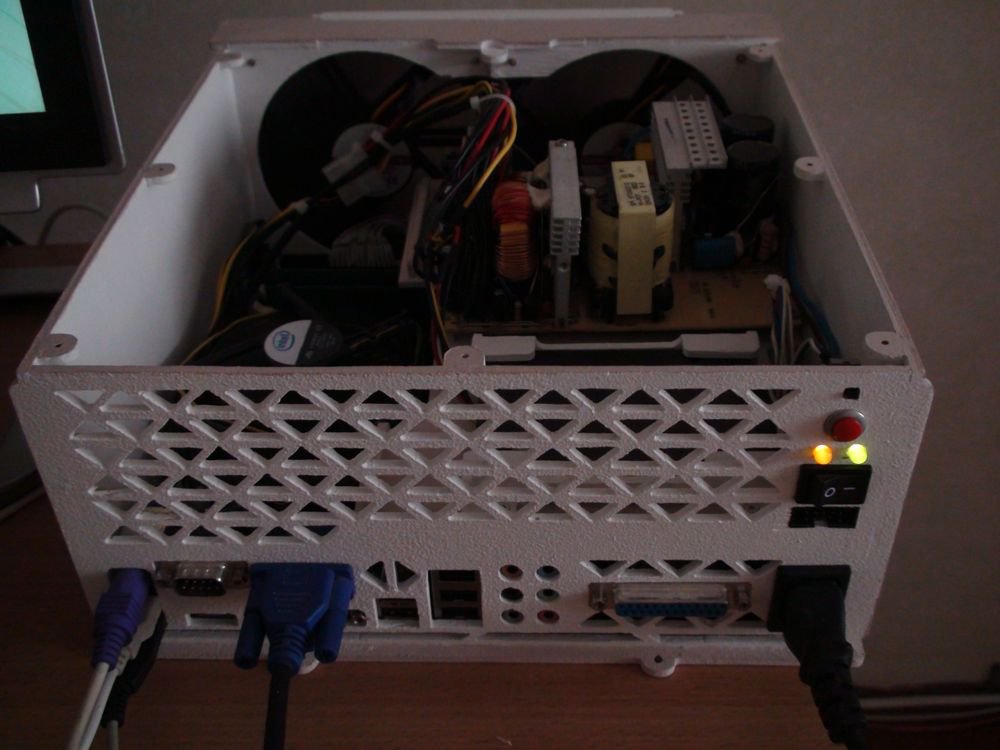
Ящичек для компа уже запилил на нем в качестве обкатки. Чертежи этого ящичка есть, могу сбросить если кому нужно.





 1
1 -
2 часа назад, andrey.drabchuck сказал:А потянет ли его малинка?
С линуксом у меня не сильно срослось, тут пусть более опытные коллеги подскажут
2 часа назад, andrey.drabchuck сказал:Но для фрезеровки уже нет?
Для фрезеровки тоже вполне достойный вариант, мач и линукс более гибкие в настройке под нестандартные нужды, но линукс нужно править ручками, а под мач писать скрипты, а это мало кому нужно. Кстати, еще одно преимущество GRBL - он работает от юсб, ненужен комп с лпт-портом, для многих это важно.
2 часа назад, andrey.drabchuck сказал:А почему просто не взять коробку от эл. проводки подходящих размеров?
Можно и коробку от электропроводки, но они скучно выглядят, можно из листового пластика сделать, с пазами для точной сборки, с V-образными пропилами для сгиба, там много вариантов что можно придумать.
2 часа назад, andrey.drabchuck сказал:Так что всё таки лучше использовать для направляющих в моём случае? От принтера или заказать у китайцев? Подшипник скольжения или качения?
И ещё, если искать шаговики. То какие, кроме ДШИ, подходят?
Если принтеры достанутся "безвоздмездно, т.е. даром", или за символическую сумму, то можно и с ними поковыряться, если покупать - то лучше купить готовые, они сейчас вполне доступны.
С шаговиками тоже самое, если достанутся бесплатно - на попробывать можно прикрутить любые, если покупать - то для мелкого станочка с трапецией или даже шпилькой хватит любого нема 17 (фланец 42х42мм) длиной 40-48мм, они обычно имеют момент 0.4-0.5Нм, такие шаговики достаточно мощные чтобы разогнать на трапеции с шагом 3мм до 2000-3000мм/мин и еще недостаточно мощные чтобы повредить сам станок в аварийной ситуации, просто остановятся и будут трещать на месте.
2 часа назад, andrey.drabchuck сказал:Я имею ввиду какое устройство сможет их выдать?
Можно авиамодельный движок прикрутить, но сам шпиндель прийдется делать, вопрос балансировки на больших оборотах открытый.
Для себя решил что самый бюджетный вариант - это китайский дремель, подши поменять легко, щетки тоже, единственное шумноватый он, но опять же, для эпизодических работ вполне вариант.
А если делать уже серьезно, то у китайцев есть шпиндели на 250-300Вт на 60к оборотов, ценник там не особо радостный и частотник ему нужен на 1000Гц.
0 -
13 минуты назад, Illluminat сказал:вот на олх нашёл такие?
Ага
0 -
6 часов назад, Dr.Pashtet сказал:Один купил лидшайн для сравнения. Никакой разницы не заметил.
Из коробки разница может быть минимальна, но ценность цифровых лидшайнов в возможности тонкой настройки, можно настроить так, что шаговик будет на низких оборотах работать без шума и вибраций.
3 часа назад, aegis сказал:и по оборотам тоже?
Одни вексты попались которые могли более 3к оборотов выдать, причем при максимальных ПИ-коэффициентах, прыгал по столу вполне как серва.
ТС могу посоветовать такие или похожие драйвера - http://www.applied-motion.com/products/series/st-stepper-drives
Стоимость новых, конечно, за гранью добра и зла, но на ибеях вполне можно выловить за цену тех же цифровых лидшайнов. У них есть возможность запрограммировать на выполнение простых команд, например, поставить 2 концевика, 1 кнопку и в несколько строк набросать ему что при нажатии кнопки едем в такую-то сторону с такой-то скоростью до срабатывания концевика, при повторном нажатии едем в обратную сторону с другой скоростью или может сам вернуться в исходную точку. Можно зацепить парочку таких и настроить так, чтобы при срабатывания концевика остановливать первую ось, а вторую сдвигать на нужное расстояние и запускать опять первую и таким образом реализовать пыление плоскости заготовки. Для настройки комп будет нужен, а потом они могут работать автономно, без компьютера. Как надоест играться с автоподачей - отключаем выполнение по программе, поключаем степ/дир и крутим их мачем/линуксом как обычные драйвера.
0 -
5 часов назад, andrey.drabchuck сказал:Что имел ввиду под "точностью" ? -- Одинаковая погрешность при сверловке отверстий независимо от места на плате.
Что тогда? Только ШВП?
Неравномерность шага большая, если делать гайку с выборкой люфта, то в одном месте нормально работает, в другом люфтит, в третьем практически клинит, сырая шпилька стирается капралоновой гайкой очень быстро и начинает люфтить везде. Можно использовать трапецию, ну или ШВП, это лучший вариант.
5 часов назад, andrey.drabchuck сказал:Как их отличить?
Честно, без понятия, еще давно (когда интернет был по карточкам) тоже загорелся идеей ЧПУ, но тогда доступа к ибеям не было, а али вообще не существовало, чтобы унять зуд творчества пришлось искать из чего можно сделать, зашел в первый сервисный центр, спросил насчет принтеров, ну мне и насыпали за бесплатно сколько смог увезти, самые удачные оказались как раз старые японцы, чем новее - тем более хлипкое все внутри было.
5 часов назад, andrey.drabchuck сказал:Что удобнее? Что выгоднее по соотношению "удобство\цена" ? Ваше мнение?
Ну линукс бесплатный, за лицензию у мача просят денежку, но есть торрент-версии, GRBL тоже бесплатный, но возможности поскромнее, но для простой сверлилки вполне достаточен будет.
5 часов назад, andrey.drabchuck сказал:Сверху раздувает, а снизу из поддона засасывает.
В любом случае стеклянная пыль будет в воздухе, а там сплошные витамины
мой выбор - не давать ей вообще в воздух подняться, еще плюсы воды что она снимает статику и для фрезеровки пластиковых корпусов (мы же захотим свое произведение красиво оформить) хорошо охлаждает и не дает наматываться материалу на фрезу.
5 часов назад, andrey.drabchuck сказал:Вот такой и нужен.
Если нужно, могу поискать фотки своей фанерки, может на какие мысли натолкнет.
5 часов назад, Dr.Pashtet сказал:Делать на валах и втулках крайне не советую. Очень чувствительны к перекосам. Чуть перекос и клин. Нужно на подшипниках качания.
Зато такой узел получается заметно жестче, а в станках из желудей и веток ее и так немного, но зато на подшипниках качения собрать проще, факт.
1 -
15 часов назад, andrey.drabchuck сказал:Сможет ли она выдержать точность 0,1-0,2 мм для сверловки?
На всем поле точно не сможет, на квадрате 50х50мм может получиться, обычная шпилька со строймага сильно большой точностью не отличается
15 часов назад, andrey.drabchuck сказал:Стоит ли париться и искать принтеры ради моторов?
Если искать принтеры, то нужны старые японские эпсоны и бразеры, желательно формата А3, там валы потолще и в качестве подшипников бронзовые втулки, и моторчики помощнее, хотя они все высокоиндуктивные, на большие скорости рассчитывать не приходится
15 часов назад, andrey.drabchuck сказал:ДСП -- это крайняк. Я думаю про фанеру 16 мм
Верно, фанера намного лучший материал
15 часов назад, andrey.drabchuck сказал:под управлением чего они нормально заведутся
Чего угодно, вопрос предпочтений, Mach3, LinuxCNC, можно ардуинку с GRBL использовать
15 часов назад, andrey.drabchuck сказал:возможно ли будет организоваться "купольное" пылеудаление
Крайне не советую, при сверловке плат летит стекляная пыль, и еще ее раздувать притоком/вытяжкой не самая лучшая мысль. Проще на саму плату побрызгать водой, можно мыльной, чтобы вся пыль оставалась на плате, по мере высыхания (если плата большая, и время работы тоже значительное) добавляем водички.
Делал тоже такой учебно-тренировочный вариант с родными валами со втулками и моторами из принтеров и разной фанерки, с дремелем в качестве шпинделя, несмотря на свою трехкопеечность для мелких и единоразовых работ вполне вариант.
1 -
13 часа назад, Illluminat сказал:на драйвере указано что Можна на него подавать как постоянное напряжение так и переменное
Leadshine и Yako нормально работают на переменке
13 часа назад, Illluminat сказал:до каких оборотов я смогу раскрутить шаговички
Нужно знать напряжение питание, ток и индуктивность обмоток двигателя, кол-во выводов и тип соединения, тогда можно будет рассчитать обороты.
Кстати, люфт этих редукторов измеряли? Может получится что они будут непригодны для точного позиционирования, японские Vexta такого типа имеют люфт в 0.5 градуса.
0 -
Появились в "моих товарах" какие-то пустые объявления, в общей барахолке их не видно.
Первое
и второе
Не уверен что ссылки корректно отобразились, если нужно, могу добавить скриншоты. Можно их убрать?
0 -
27 минут назад, softm сказал:Только фото.
Картинку пытался прикрепить в формате *.png, или только *.jpg подходит?
0 -
Появился вопрос: в барахолке при ответе на вопросы какие типы файлов можно прикреплять? Хотел тут схемку сбросить, прикрепил сначала пдф, ничего не отобразилось, потом сделал скриншот и попробывал картинку прикрепить, тот же результат. Вот в этом лоте такое:
0 -
1 час назад, grandprix сказал:Серва даэ таку точність?
Обычный сервомотор с 2048 линиями на оборот на ШВП с шагом 5мм выдает предварительно оцененую точность позиционирования (при идеальном винте и отсутствии люфтов) в 0.003-0.006мм. Можно попытаться вытянуть точнее, зависит от настроек сервопривода и соотношения момента инерции мотора к моменту инерции нагрузки. Но да, с более высоким разрешением энкодера все, конечно, выходит повеселее. С прямым приводом другая сложность - нужны сервомоторы высокого момента, с оборотами, как правило, 1000-1500об/мин, стоимость таких всреднем в 1.5-2 раза больше чем аналогичной мощности на 3000об/мин.
0 -
9 часов назад, Dr.Pashtet сказал:3 оборота мотора в минуту
Это нужны сервы с большим разрешением энкодера, от 17 бит и выше, такие хорошо обеспечивают плавность на таких низких скоростях, и отстроить их будет проще.
9 часов назад, Dr.Pashtet сказал:при скорости в 1000 мм/мин и быстрых сменах направления с ускорением 200, мотору придется не сладко. Да и сможет ли ротор мотора так быстро менять направление вращения и ускорения.
Серву можно разогнать с нуля до максимальных оборотов и, наоборот, затормозить с максимума до нуля так, что выглядит и слышится как 2 удара, т.е. удар - и серва на максимальных оборотах, второй удар - серва уже стоит на месте. У той же дельты для низкоинерционных двигателей время измения скорости двигателя от 3000об/мин до -3000об/мин составляет 10мс. Конечно, для таких режимов все остальное должно соответствовать, механика должна быть без люфтов, рельсы и ШВП с преднатягом, опоры с винтов с дуплексами и т.д., иначе серва очень быстро разобьет всю механику.
10 часов назад, Dr.Pashtet сказал:вопрос в точности ее позиционирования
В зависимости от момент инерции приведенного к валу мотора, точности настроек и режимов работы сервопривод обеспечивает разрешение в динамике примерно в +-10 меток энкодера. Можно попытаться вытянуть точнее, но резко возрастает возможность самовозбуждения. Самый простой сервомотор с 2048 линиями на оборот на ШВП с шагом 5мм выдаст предварительно оцененую точность позиционирования (опять же, при нормальной механике, идеальном винте и отсутствии люфтов) в 0.003-0.006мм. При ненормальности механики, ударных нагрузках, высокому соотношению момента инерции ротора мотора к моменту инерции нагрузки цифры будут хуже.
0 -
Нужно было на английском распечатать, там 720стр, чтобы точно хватило
0 -
1 час назад, Yfowler сказал:NC300 3240-4470$, пульт к ней ещё 800-1560$
Хмм, никогда не присматривался к этим штукам с экранчиком и кнопочками, а оно вон чего... Надо будет узнать за сколько можно будет такую бэушную выловить. Почитаю на досуге про них, может действительно это аналог какого-то сименса или фанука и есть смысл заморочиться с поиском.
0 -
Насчет цены имел ввиду цены у оф представителя Дельты в Китае, что наши продавцы рисуют - это другой вопрос. Линейки не обязательно подключать к ЧПУ, есть такие стойки, со своим софтом, к которым их не подключишь, но можно их подключить к сервам, и тогда убрать погрешности позиционирования из-за люфтов, температурных и упругих деформаций. Кто-то на каком-то форуме выкладывал как раз такой пример, станок не помню какой, какая-то эрозия, там своя стойка со своим софтом, подключать линейки некуда, после дня работы разбег по осям набегал пару десяток, после того, как завели линейки в сервы, разбег стал пару соток.
0 -
7 часов назад, Shkvarka сказал:В а2 переплатить за кучу фишек которые в ЧПУ не пригодятся... Разве что энкодер получше если память не изменяет, а разница между а2 и б2 приличная
Энкодер в А2 на 1 280 000 имп/об, в В2 на 160 000, разница приличная, с таким разрешением только сигма 5 и мицухи J3 или даже J4, надо мануал смотреть. Сколько эти варианты будут стоить, можно на том же ебее уточнить. Кстати, для новых разница между комплектами А2 и В2 для варианта 400Вт всего в $40-50 выходит, а б/у вообще одинаково стоят. Поэтому при одинаковой цене все "ненужные фишки" становятся просто бесплатным бонусом, хотя разница между использованием тех же линеек для ЧПУ очень ощутимая, особенно если стойка не поддерживает подключение внешних энкодеров/линеек.
0 -
Почему-то перестал добавляться рейтинг продаж, т.е. сделки завершены, товар попадает в категорию "проданные", а на кол-ве продаж это не отражается.
0 -
3 минуты назад, Одессит сказал:Вы про "паркер" 90-го размера?
Который 60-го размера, с 90-м ясно что по моменту подходит.
0 -
9 часов назад, Yfowler сказал:Наверное это дорого и долго, и винты надо с десятым шагом ставить.
Специально такие редукторы не искал, по ценам 25-й типоразмер что-то в районе $150-200 попадался, 16-й раза в 2 дешевле, редукцию можно любую найти, если нужны винты с шагом 10мм - их тоже не проблема найти.
0 -
1 час назад, Острозуб сказал:такой выбор моторы Яскава,сигма1, 750 вт,3000об\мин,и редуктора Паркер,10:1
Мелкий редуктор похоже совсем мелкий, по моменту подходит для такой сервы?
Когда говорил о редукторах, имел ввиду вот такого плана связку как на фото, для понимания масштаба там серва установлена 200Вт.

 0
0 -
9 часов назад, Yfowler сказал:Да, скиньте, пригодится многим.
Почему я на 400вт повелся, на чипру есть тема о 67к25 в Тернополе собраном на четирехсотых мацурах, везде редукция 1:3 , Z разгружена воздухом.
Ну если есть практическое подтверждение, тогда можно считать расчет решенным.
На соседнем форуме умный дядька выложил пример расчета мощности двигателей для фрезерного ЧПУ, приведу его полностью:
ЦитатаЛюбая задача движения тел начинается с:
Определение сил действующих в системе.
В первую очередь определяем силу трения в направляющих стола. Идем в справочник и смотрим коэфф. трения скольжения чугуна по чугуну. Я взял его равным 0.2. Если есть другие данные - используем их. Вес стола считаем 100кгс, вес детали 300кгс.
Сила трения = коэфф. трения * вес движущейся системы. Итак сила равна 0.2 * 9.81 * (100кг+300кг) = 785Н. Такая сила будет сопротивляться движению стола с деталью.
Вторая сила - сила инерции, которую нужно преодолеть двигателю при разгоне массы стола с деталью на нем. Вспоминаем старика Ньютона и говорим, что сила сопротивления массы, ее ускорению = массе * ускорение массы.
Масса стола с деталью известна 100кг+300кг=400кг. Ускорение какое хотим получить зависит только от наших предпочтений и здравого смысла. Ускорение 0.2м/с2 слишком маленькое, будет как черепаха разгоняться. Примем ускорение 2м/с2. Это куда лучше. Итак, определим силу инерции:
400кг * 2м/с2 = 800Н. Эту силу нужно приложить к массе 400кг, чтобы она ускорялась/замедлялась с ускорением 2м/с2.
Полная сила сопротивления складывается из силы трения, силы инерции и силы резания. Просуммируем их. 785Н + 800Н + 3000Н = 4585Н. Вот эту силу и должен развивать привод стола на гайке ШВП.
Со силами закончили. Дальше требуется:
Определение мощности привода.
Механическая мощность равна силе сопротивления движению * на скорость движения. Силу мы нашли. Скорость задана в 2м/мин, переводим в м/с = 0.03(3)м/с. Находим механическую мощность.
4585Н*0.0333м/с = 153Вт. Итого, серво мощностью 160Вт справится с такой задачей. Если хочется то учтем КПД системы привода - ШВП. Какой КПД у ШВП хрен знает, примем его равным 95%. Требуемая мощность двигателя равна 153Вт/0.95 = 161Вт
Вывод - серва мощностью 160Вт подходит для наших целей. Можно использовать привод на 160-200Вт.
С мощностями закончили, переходим к:
Определение нужной редукции оборотов.
Редукцию определяем исходя из максимальной скорости перемещения стола и номинальных оборотов сервопривода. Если скорость перемещения стола 2000мм/мин, шаг винта ШВП 5мм, то винт ШВП должен вращаться со скоростью 2000мм/5мм=400об/мин. Коэффициент редукции теперь зависит от номинальных оборотов серво. Если серва на 6000об/мин, то редукция = 6000/400 = 15 раз.
Осталось провериться по последнему фактору:
Определение преобразования крутящего момента в осевое усилие.
ШВП это преобразователь вращательного движения в поступательное с коэффициентом редукции крутящего момента в осевое усилие, определяемым однозначно через шаг винта. Определить редукцию ШВП можно использовав закон сохранения энергии. Так как момент в системе СИ измеряется в Нм, то вращательное движение рассматриваем на окружности радиуса 1м.
Из закона сохранения энергии работа проделанная при прохождении длины окружности радиусом 1м, должна равняться работе при осевом перемещении гайки ШВП за один оборот. Коэфф редукции усилия определяется как отношение длины окружности радиусом 1м, к шагу винта в метрах.
Определим редукцию усилия. За один оборот точка на окружности радиусом 1м, пройдет ровно 2* Пи * 1м = 6. 2832м. За один оборот ШВП, гайка сместится на шаг винта, то есть на 5мм. Редукция усилия равна 6.2832/0.005м = 1256 раз. То есть ШВП преобразует крутящий момент в линейное усилие с фактором умножения 1256. Если учесть КПД винтовой пары (хрен его знает, примем за 95%) то реальная редукция чуток уменьшится и составит 1256*0.95 = 1193 раза.
Серва мощностью 180Вт и номинальными оборотами 6000об/мин, имеет крутящий момент 0.286Нм. Просчитаем какое усилие такая серва разовьет на гайке ШВП, через редуктор 1:15.
Общая редукция = 15 * 1193 = 17895 раз. Множим момент на общую редукцию и получим линейное усилие на гайке ШВП. Итак 17895м-1 * 0.286Нм = 5118Н. Что и требовалось доказать.
Вывод: Серва мощностью 180Вт уверенно справится с поставленной задачей.
Можно еще учесть КПД редуктора от сервы к ШВП, но это делается элементарно.
Итак, полет разобран, спасибо за внимание :crazy:
1 -
Могу сбросить пример расчета двигателей для станка, сможете прикинуть сколько нужно, а там уже решать: или редукторы, или приводы с высоким моментом.
0


в Новини сайту та форуму
Опубліковано:
Не получается приостановить объявление, вот это -
говорит что действие недоступно для моего аккаунта и выдает вот такую ошибку - CL-PENDINGDEAL/1
Все происходит на компе с вин7 х64 в хроме 60.0.3112.101.