-
Оголошення
-

Кріпта 26.04.24
В нас новий спосіб поповнення балансу - через кріпту.
Через лот. на довільну кількість USDT TRC20.
Посилання - в розділі "Підтримати"
-

Mr.Mass
КористувачіПовідомлення, опубліковані користувачем Mr.Mass
-
-
8 часов назад, newengine сказал:...а как операционную систему и Мач 3 запускать на thin client ?
Так же как и на любом компьютере, внутри там тот же процессор, память, жесткий и т.д., просто это все очень компактно собрано и работает от 12В.
0 -
У подобных датчиков корпус с землей не соединен.
Если питание датчика будет +24В, то экранирование тоже не нужно, даже для китайских датчиков.
0 -
3 часа назад, Болт1 сказал:8,5 N.m - это сколько килограм?
Применительно к моторам иногда используется используется величина килограмм-сила-сантиметр, 8,5Нм=86,68 кгс·см.
По шаговикам если принять что натяг в гайке и направляющих небольшой и ускорения не больше 200мм/с2 то хватит шаговика с моментом 2Нм. Это типоразмер нема 23, фланец 57х57мм. Можно посмотреть на нема 24, они чуть крупнее, 60х60мм, момент момент около 3-3.5Нм, будет некоторый запас по моменту. Следующий типоразмер нема34 имеет фланец 86х86мм, момент от 4Нм, но конструктивно может быть сложно их разместить из-за их размера. Драйвер подбираем уже для выбранного шаговика, если бюджет позволит то лучше цифровой, БП подбираем по верхней границе питания драйвера минус 10% для запаса, т.е. для 50В берем БП на 45В.
0 -
Чтобы точно рассчитать какой двигатель подойдет нужно понимать какой тип привода будет, например, для винта нужно знать следующие пар-ры:
- Вид винта, трапеция или ШВП
- Шаг винта
- Преднатяг в гайке
- Диаметр винта, мм
- Длина винта, мм
- Перемещаемая осью масса(портала, стола с заготовкой), кг
- Желаемое линейное усилие(усилие реза/давления) на полной скорости, кгс
- Желаемая скорость рабочего перемещения(когда ось испытывает линейное усилие), м/мин
- Желаемая скорость холостого перемещения(когда ось только крутит винт и движет массу), м/мин
- Желаемое ускорение, мм/с2Еще нужно не забывать что шаговик с ростом оборотов теряет момент, причем чем мощнее шаговик, тем сильнее потеря момента с оборотами. Это все можно рассчитать. Для оценочной прикидки шаговик с моментом 1Нм на винте с шагом 2мм при КПД винта 100% создаст осевое усилие 320.35кгс.
2 -
9 часов назад, Ode$$it сказал:на ибее приобрету нечто вроде такого варианта
С фануками аккуратно, все которые попадались были сетевые, степ/дира или аналога у них нет и покрутить их без родного контроллера тоже не получится. По цене конкретно эти варианты тоже не особо, серву на 3-5кВт можно в районе килобакса сделать, это мотор+драйвер. С редуктором сложнее, под 130-й фланец брендовый планетарник даже б/у прилично потянет, да и попадаются они редко.
0 -
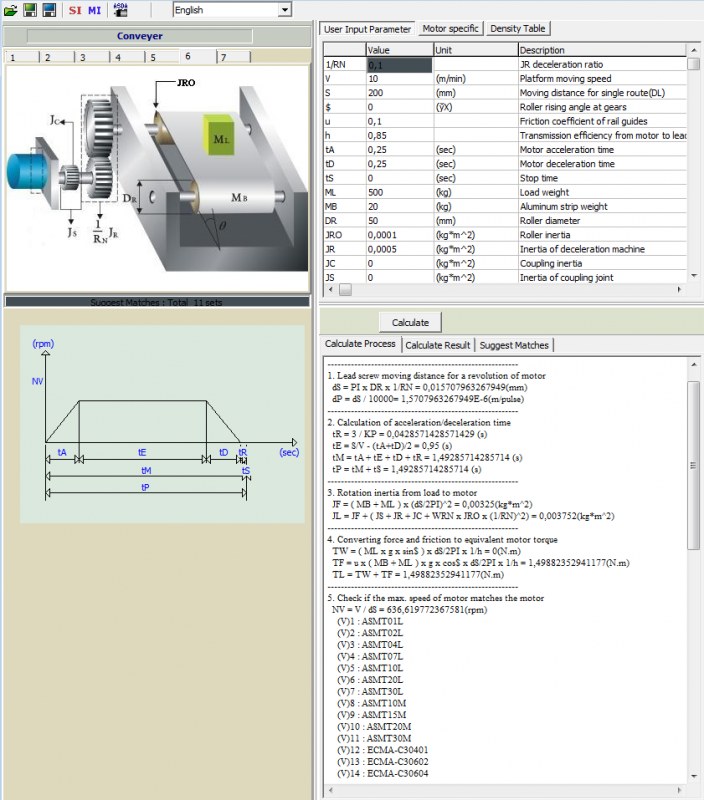
1 час назад, doska сказал:Самый сложный вопрос при подобной переделке - а как посчитать?
Элементарно, у производителей серв есть свои программы для расчета, подставляем нужные значения и получаем подходящие моторы.
Вот, для примера, дельтовская прога для варианта с ременным приводом.
 0
0 -
Вот такого плана платки ставлю в станки. Основные преимущества - небольшой размер (170х170мм), жесткий формата MSATA втыкается прямо в плату, питание +12В, LPT, PCI, 2 Ethernet'а - по вкусу, они бывают сильно разные. Итого никаких проводов, громоздких компьютерных БП, внешних карт и прочего, можно незаметно прислонить такой комп в ящике.
Если LPT не нужен, а планирутся контроллер с USB или Ethernet, то можно посмотреть на т.н. thin client, они еще мельче (конкретно который на фото 167x131x31.5mm) и уже в корпусе.



 1
1 -
Векторный режим нужен бездатчиковый или полноценный с энкодером?
Если первый, по практически все дельты его поддерживают, еще из китайцев есть Sunfar С300 и С320, V350 с возможностью подключения энкодера.
Если б/у бренд рассматривать, то бездатчиковый практически все поддерживают, сименс, данфос, эмерсон, шнайдер модели altivar 11 и 12.
2 -
Делал похожие штуки, выбрал управление по степ/дир, с аналогом не хотелось возиться из-за двухполярного источника.
Использовал контроллер с частотой 40кГц, по самой логике пожелание заказчика чтобы было максимально просто и полностью похоже на управление с частотника. Поэтому из всего управления было 3 кнопки: старт/стоп, реверс и ускоренная подача, ну и резистор для задания самой скорости. Со старт/стопом и реверсом все понятно, а кнопка ускоренной подачи переключала диапазоны работы, в обычном режиме обороты были 0-300об/мин, в ускоренном - 0-3000об/мин, как раз для холостых переходов.
 1
1 -
В 11/20/2019 в 14:43, vendoteron сказал:натрапив на китайську серву
Если инструкция к китайской серве будет соответствовать самой железке - считайте повезло, тогда ее можно будет подключить и настроить. Все китай сервы которые попадались мощностью более 750Вт уже хотят по питанию 3фазы, причем 220В, так что практически наверняка будет нужно решать вопрос с трансформатором для нее. Если эти вопросы решатся удачно - то серва будет идеальным вариантом для привода.
Кстати, глянул по ссылке шпиндель, это вариант больше для сверления, у него все подшипники обычные радиальные, есть такой же, но уже с радиально-упорными, он уже для фрезеровки.
1 -
Нет, для моторов 3-й серии подходят приводы серий А, А+, АВ. Серия А3 может работать с моторами 1-й серии от А2, а приводы А2 - с моторами 2-й серии от В2.
1 -
В 7/7/2019 в 18:55, Николай Владимирович сказал:Можно на Delta с двигателя снять энкодер и установить его на швп
С новыми моделями точно не получится, люфты и нежесткость винта будут привод сводить с ума. Пробовали такие варианты перестановки энкодера как раз с китайскими сервами, работало, но оно и понятно, энкодер с низким разрешением и мозги привода не слишком продвинутые. Поэтому если в современных приводах какого-то функционала нет под наши задачи, ищем и ставим тот, в котором есть, благо сейчас выбор огромный.
В 7/7/2019 в 18:55, Николай Владимирович сказал:протокол (интерфейсом) она работает
Обычный ABZ, питание +5В. Кстати, эту функцию можно использовать для портальных систем с 2-я приводами на ось, сервы будут синхронизироваться друг с другом, уменьшается кол-во задействованных осей контроллера, отпадает необходимость в процедуре выравнивания портала.
1 -
2 часа назад, Николай Владимирович сказал:какую серию взять А2 или В2
Впринципе, любых приводов из этих серий по точности позиционирования будет более чем достаточно. А2 более свежая, частота сервоцикла повыше, энкодеры с большим разрешением, ну и возможность подключения внешних энкодеров (линеек), и по цене где-то на четверть дороже. Поэтому выбор в основном будет зависить от необходимости подключения линеек.
Кстати, уже вышла серия А3, по хар-кам весьма впечатляющие, если брать новые, есть смысл посмотреть на них, цена не сильно отличается от А2.
1 -
13 часа назад, Николай Владимирович сказал:Delta, TECO
Это тайваньские фирмы. У TECO вообще большинство серв сделаны по лицензии японской Tamagawa, полностью совпадают по настройкам и подключению, даже наклейки таким же шрифтом сделаны, так что по факту это японские приводы. У дельты приводы своей разработки, но очень достойного уровня и качества. Для примера, дельта разработала приводы для Schneider, практически полная копия серии А2, только нет возможности подключения линеек, и для американской Teknic. Еще они прилагают приличные усилия для продвижения на рынках стран СНГ, поэтому есть оф представительства, документация для всех моделей на русском языке.
Основное отличие от дешевых китайских приводов, которыми завален весь али и прочие барахолки - в динамическом позиционировании. Если у нас задача просто крутить эту серву с постоянной скоростью, например, привод шпинделя, или поставить ее на конвеер, где нужно доехать из точки А в точку В и остановиться, то такие привода подходят. Но если есть задача следования траектории - вот тут и начинаются ньюансы, разница по сравнению с фирменными приводами будет даже не в разы, а на порядки. Силовую часть китайцы скопировали неплохо, а вот с алгоритмами и математикой у них пока не сильно получается. Поэтому "дури" в них достаточно, а вот с "интеллектом" - пока не сложилось. Ну и всякие мелочи, вроде отсутствие нормальной документации, несовпадения этой самой документации с реальной железкой, отсутствие софта для настройки, как и людей реально с ними работавших, что не позволяет рассчитывать на какую-либо помочь по настройке. Это все может очень сильно замедлить, или вообще сделать невозможным запуск и настройку таких приводов, особенно если нет опыта в подобных работах.
Поэтому, на мой взгляд, экономия при покупке может вылиться в гораздо большие затраты при пуско-наладке.
4 -
ТВ6560 с такими шаговиками очень неподходящий вариант, движки будут очень серьезно, почти в 3 раза, недогружены по току, и, соответственно, выдадут меньший момент. Чтобы полностью реализовать их возможности нужен драйвер на 8.4А. Момент удержания в номинале у них примерно 1Нм, можно рассчитывать на треть от этого с ТВ6560, для примера, на винте с шагом 5мм получится примерно 40кгс осевого усилия, это без учета потерь на силы трения.
Чтобы точно рассчитать какое напряжение нужно для достижения определенной скорости, нужно знать индуктивность обмоток. Эти шаговики должны быть довольно низкоиндуктивные, значит 500об/мин на питании 24В должны достичь без проблем.
1 -
Шаговики, БП на 24В 500Вт сделаю, ремни есть MXL 10мм, шкивы тоже были какие-то, кто в курсе уточните какая длина нужна у ремня и сколько шестерен, поищу в закромах.
2 -
В 2/27/2019 в 19:08, olkogr сказал:момент 12Нм. Нарахували 800євро.
Новый нужен или б/у подойдет? В такой бюджет с таким моментом вполне можно готовый комплектный привод NSK ESB Megatorque или CKD ABSODEX взять.
0 -
7 часов назад, UmkaRD сказал:драйвера должны быть все одинаковые
Да хоть все разные, если по рабочему току и напряжению подходят.
1 -
У гибридов в основе тот шаговый двигатель со всеми его особенностями, падением момента с оборотами, резонансами, невысокой скоростью, нагревом. Единственное их преимущество перед перед обычными шаговиками это то, что они не пропускают шаги, а если уйдет в срыв то активирует сигнал ошибки. Кстати, у того же лидшайна есть драйвера которые позволяют определить срыв шаговика и без энкодера и тоже имеют выход ошибки.
10 часов назад, UmkaRD сказал:Шаговый двигатель 86HSE8N-BC38
График похоже не от этого двигателя
10 часов назад, UmkaRD сказал:Драйвер HBS86H
Это подделка под лидшайн, конечно, лучше выбрать оригинал, хотя бы можно будет рассчитывать на получения заявленных хар-к.
Вообще сравнивая цены на эти гибриды то за сопоставимые деньги будет намного лучше взять б/у японскую АС серву на 200-400Вт, по сравнению с которой любой шаговик, хоть с энкодером, хоть без, просто спрячется. Но опять же, это лично мои предпочтения на основе ковыряния разных железяк
") 0
0 -
5 часов назад, UmkaRD сказал:лучшим по заявленным характеристикам будет движок 34HS4802
Лучшим будет японский или американский шаговик, но это мои личные предпочтения
Если выбираем только из этих 2-х и ориентируемся только на заявленные хар-ки, тогда да, первый выглядит получше.
3 часа назад, UmkaRD сказал:Драйвер от лидшайн ЕМ806 подойдет к ШД 34HS4802?
Хороший вариант, вообще это переименованный АМ882.
2 часа назад, UmkaRD сказал:DMA860H недорогой драйвер от лидшайна
Тоже подойдет, но у него нет возможности для подключения к компьютеру для настройки ф-й антирезонанса. Но тут будет справедливо заметить что настройка там довольно сложная, и с наскока может и не получиться, да и возиться с этим мало кто хочет. С коробки особой разницы без тонкой настройки между этими драйверами не будет.
1 час назад, Quercus сказал:у чому будуть недоліки отаких найдешевших драйверів
Сама микросхема не сильно плоха, но китайцы очень сильно экономят на ее обвязке и на этих платах выброшенно все, без чего она еще хоть как-то работает. Основная претензия - нет защит, вообще никаких, сгорает если пропадает контакт на двигатели, если крутнуть подсоединенный двигатель вручную, ремонтопригодность сводится к замене самой микросхемы. Еще к недостаткам относится то, что довольно сильно греется, причем не сама микросхема, а ее стабилизаторы питания, там их 2шт стоит, при перегреве он отключается, иногда это было незаметно, но станку хватало, чтобы сбиться с траектории. Сильно шумят двигатели из-за низкой частоты внутренней ШИМ-регулировки, как следствие, сами двигатели не могут работать на больших скоростях и сама работа двигателя получаестя "жесткая", очень хорошо различаются ми даже микрошаги. Медленная опторазвязка на PC817, которая не справлялась с частотой уже при делении шага 1/4. Еще по-памяти там была какая-то кривая схема для уменьшения тока при простое, которая тоже толком не работала.
Многое из этого, конечно, можно исправить, перепаять эту плату и привести ее к схеме близкой из мануала, но мое мнение что сейчас этим можно заниматься только из-за большой любви к искусству
") В остальных случаях выбираем подходящий драйвер под шаговик, подключаем и забываем что он есть.
В остальных случаях выбираем подходящий драйвер под шаговик, подключаем и забываем что он есть.
Цифровые основаны на микроконтроллерах, в некоторых находил 32-битные кортексы, и силовыми ключами. В них встроенно большое кол-во защит практически от чего угодно, от высокого/низкого напряжения, переплюсовки, перегрева, обрыва обмоток двигателя и т.д. Многие оснащены дополнительным функционалом в виде встроенных ПЛК, возможности работать автономно без внешнего источника сигнала по заранее записанной программе, фирменными утилитами настройки, подавления резонансов, определения срыва шаговика без энкодера, мильтистепинга, морфинга и т.д. Основные качества это
- работа на низких скоростях плавно и без вибраций, присущих обычным драйверам,
- более высокая максимальная скорость работы без срывов, разница с обычными драйверами доходит до 1.5-2 раз,
- низкий или полностью отсутствующий нагрев,
- высокая частота входных импульсов, некоторые цифровые драйвера имеют частоту входных импульсов до 3МГц,
- возможность работы на максимальных токах длительное время,
- высокая надежность благодаря множеству защит и неплохая ремонтопригодность.
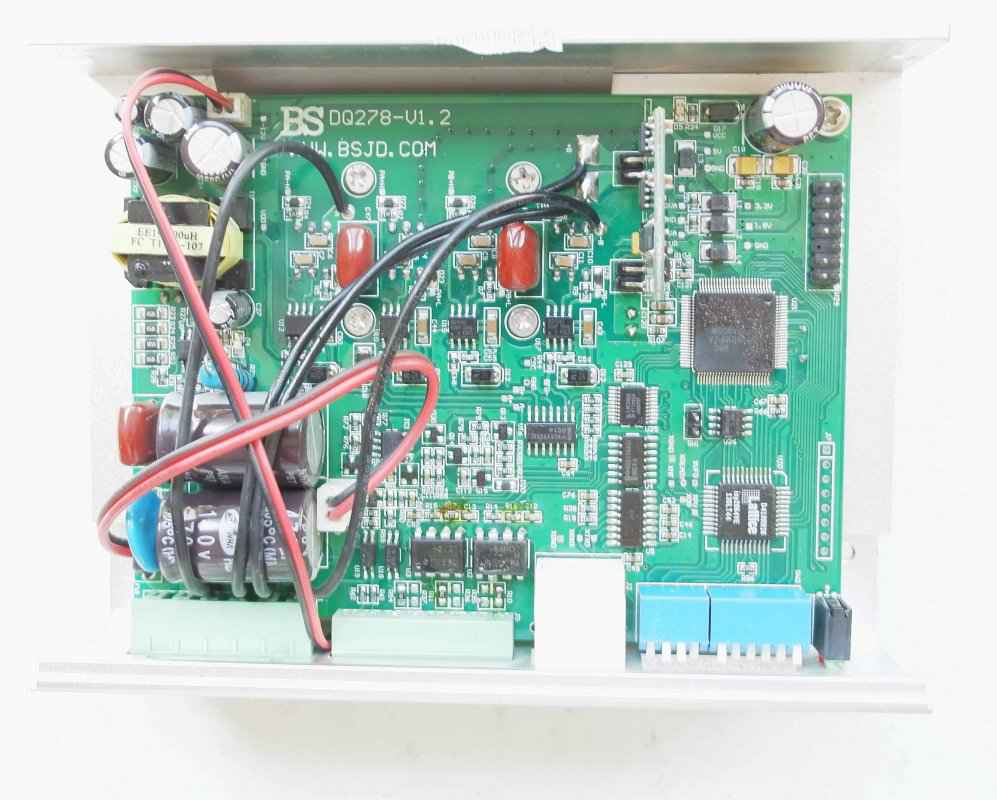
Для сравнения вот фото внутренностей нескольких цифровых драйверов, это китайские, в американских и японских все еще веселее выглядит
Ну вот, хотел кратенько, а получилось как обычно стена текста, надеюсь что кому-то поможет
 7
7 -
Чем больше индуктивность - тем меньше предельная рабочая скорость. Зависимость линейная.
Так же - чем больше рабочий ток, тем меньше скорость, при которой начнет снижаться крутящий момент. Зависимость так же линейная.
Ну и напряжение - чем больше напряжение - тем больше максимальная рабочая скорость (так же линейная зависимость).
Чем больший ток должен быть в обмотках - тем труднее его "раскачать".
Т.е. для сравнения скорости моторов нужно умножить ток на индуктивность. Обе этих величины одинаково влияют на максимальную скорость.
То есть, сравнивавать нужно магнитный поток.Все это можно рассчитать. Например, для первого мотора при напряжении питания +70В максимальная рабочая скорость будет ~568об/мин, после нее момент будет сильно падать. Это, конечно, при условии, что китайцы корректно указали параметры двигателя, они частенько могут нарисовать что-то "среднее по больнице", лучше расчеты производить на основе измеренных значений.
Драйвера советую цифровые лидшайны, у них есть возможность полностью или практически полностью убрать низко- и среднечастотные резонансы. Из своих наблюдений могу сказать что шаговики 86 типоразмера отличные генераторы резонанса. Ротор здоровенный, промежутки между зубцами тоже большие. На низких подачах вибрация такая что зубы сводит. Для рабочего тока на 5А нужен будет драйвер на минимум на 7А, это при условии обычного четырехвыводного мотора, для 6-и и 8-и выводных будет зависить как их подключить.
2 -
12 минуты назад, Partas сказал:еще у шаговиков есть неприятный минус - это резонанс на малых оборотах
Лечится тонкой настройкой цифровых драйверов, можно полностью убрать низкочастотные резонансы, ну или решить вопрос в лоб и попробывать задавить резонанс большим дроблением 1/32-1/128, если хватит частоты входных импульсов.
1 -
9 часов назад, Денис Береговой сказал:По поводу механических ИСО30 (BT30) c автосменой Вы имели ввиду такие?
Да, можно такой, это если делать полноценную автосмену, есть еще в таком же корпусе как на фото выше, только с ВТ30, там нужно будет штревель крутить.
0 -
22 часа назад, Денис Береговой сказал:Касательно шпинделя вопрос сложнее.
Есть электро шпиндели многополюсные с оборотами 9-12к, их, кстати, можно раскрутить и до 20к, или ставить механический шпиндель и к нему подходящий моторчик на пару-тройку кВт. Такие шпиндели есть с автосменой под ВТ30/40/50, если автосмена не нужна то есть варианты попроще с ER16-32. По приводу к нему можно прикрутить от асинхронников и моторов постоянного тока из бюджетного варианта вплоть до шпиндельной сервы на 12к оборотов.


 1
1
в Верстати та системи ЧПК
Опубліковано:
Это больше от операционки и настроек зависит, процы там стандартные атомы или селероны чаще всего, но бывает и i3-i7. Поэтому вообще нет никаких проблем накатить ту же десктопную винду или линукс, что собственно проделано неоднократно, все работает отлично.